

近年、製造現場の自動化や省人化が進み、産業用ロボットの導入が急増しています。
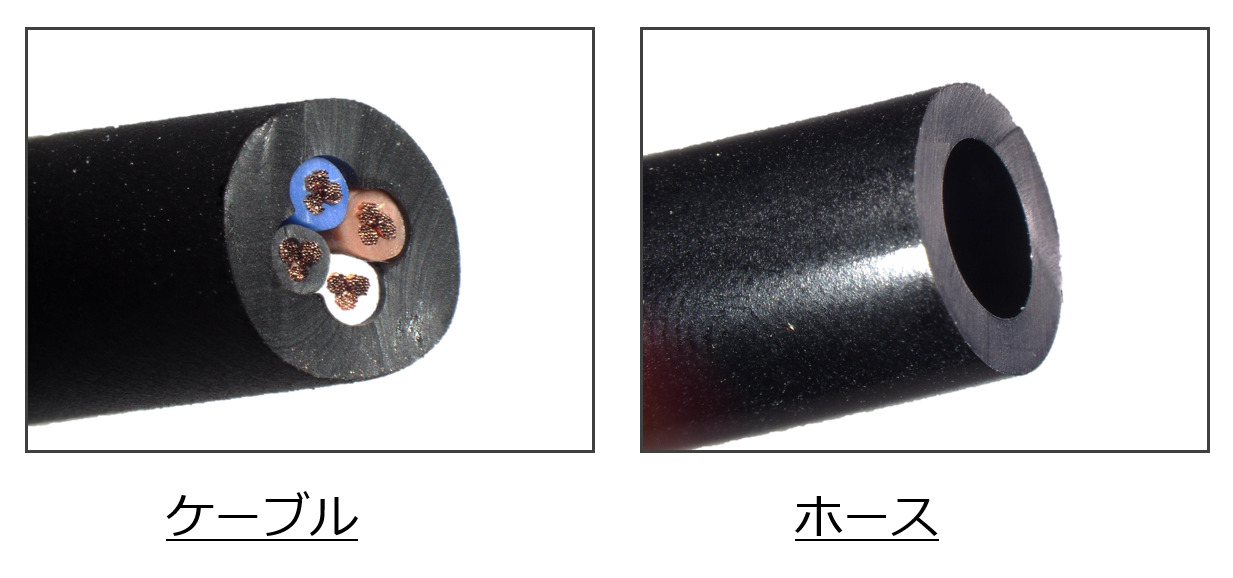
一方で、ロボットの稼働信頼性を左右する要素として、ケーブルやホースの取回し設計が注目されています。ロボットは多軸動作を繰り返すため、ケーブルやホースには繰り返しの引張・曲げ・ねじりといった複雑な応力が発生します。
設計段階でこれらの動きを正しく考慮しないと、断線、被覆割れ、ホース破損などのトラブルが生じ、結果として装置停止やメンテナンスコストの増加につながります。
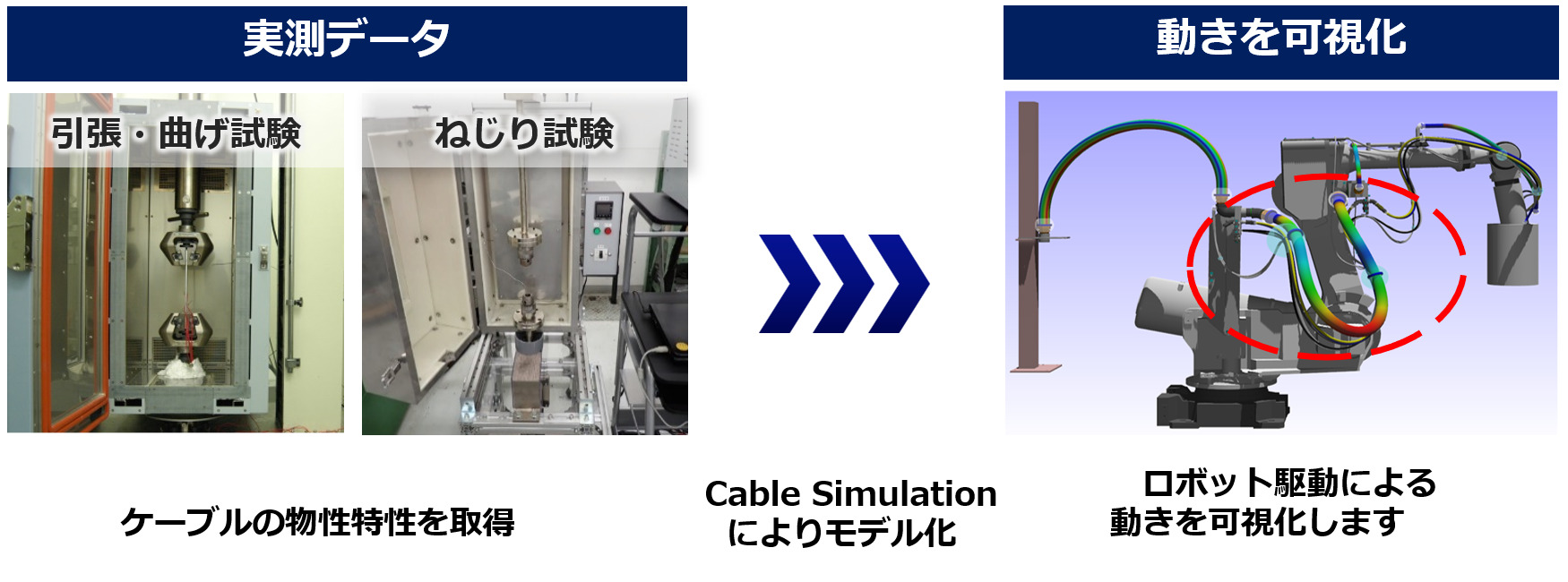
こうした背景から、近年は物性値に基づいたケーブル・ホースのシミュレーションによるバーチャルな取り回しが重要視されています。
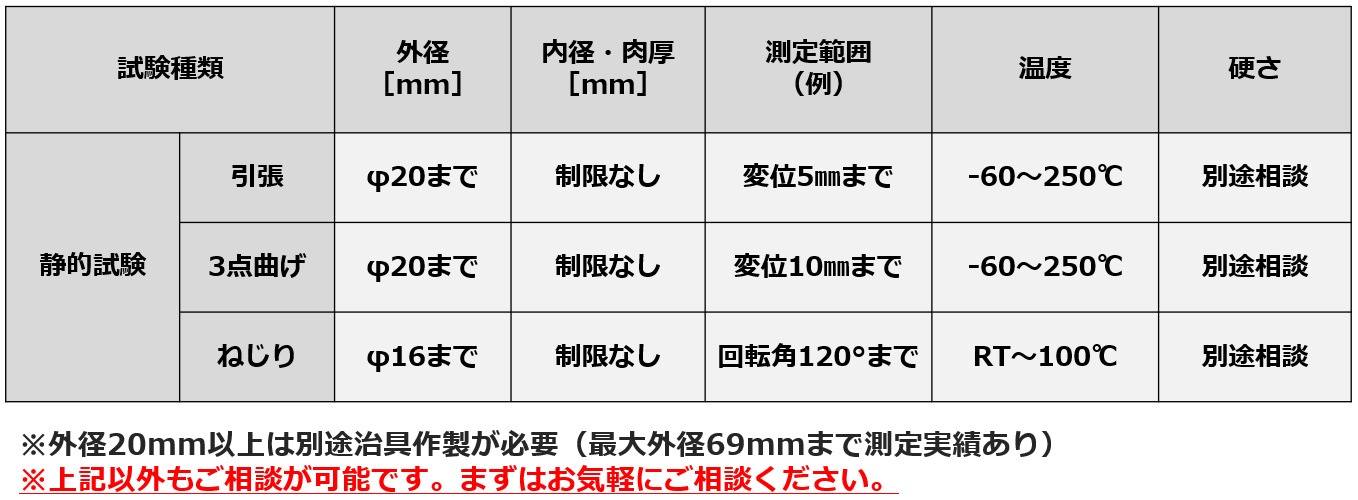
実際の機械動作を再現するためには、単なる形状情報だけでなく、「引張剛性」「曲げ剛性」「ねじり剛性」といった物性特性の把握が不可欠です。